摘要:越擎科技针对机器人产品复杂产品装配的应用场景,打造全国产的机器人离线编程软件iRobotCAM,为了更方便用户实现装配过程编程和仿真,越擎科技在软件中实现了多轴通用控制技术,可以快速精准的支持多轴设备进行机器人编程控制。
通常在非标自动化领域的装配应用场景中,用户通常只能在CAD中实现装配的动画,装配动画可以很好的反映方案的成果。但是装配动画的制作过程比较繁琐,尤其是在包含机器人以及多轴设备的情况下,每一帧下组件的位置不好控制,尤其是在复杂产线方面,要按照帧动画的模式来实现过程仿真复杂繁琐。iRobotCAM独有的通用多轴控制可以支持用户快速的建立产线中的多轴设备的模型,如果是通用模型可以支持多次复用,支持末端拖动编程,支持根据CAD特征快速找到路径点。极大程度上提升了用户实现过程仿真的效率。
简单来说 iRobotCAM 的通用多轴控制在非标自动化装配应用中有如下优势:
- 无缝的对接CAD,可以支持用户在设计方案上进行快速的工艺过程仿真,无需担心数据的丢失以及不兼容问题;
- 拥有多种强大的多轴控制方法,可以快速的实现程序的编辑,工艺过程仿真的生成;
- 支持标准自动化设备的复用,支持以组件的方式拖入仿真环境,并快速建模仿真;
- 支持非标设备的后续虚拟调试,可以在没有设备的情况下实现PLC程序的编辑调试。
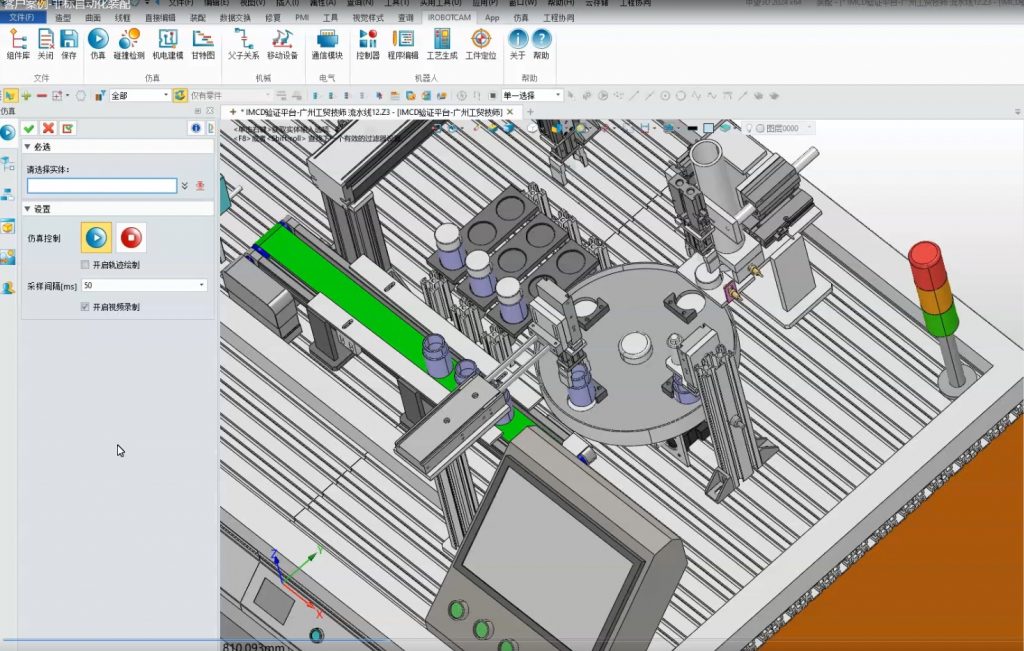
以下以瓶子装配线为例,我们看看iRobotCAM如何便捷的实现非标产线的装配自动化的。
关于越擎科技:
越擎科技致力于打造开放的iRobotCAM机器人离线编程平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.