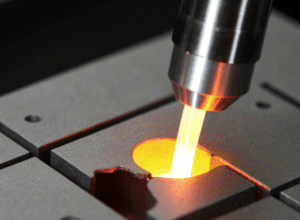
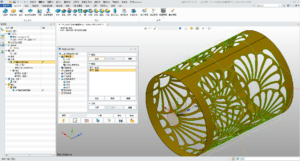
应用案例 应用案例:机器人激光切割有何难点,利用iRobotCAM如何高效地实现机器人5轴激光加工 概要:机器人激光的工艺主要在于高精度,而利用激光实 Read More » 2025年1月20日 没有评论
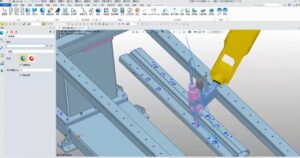
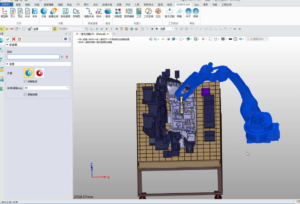
应用案例 扬州十牛自动化与越擎科技达成合作,利用iRobotCAM实现智能自动化产线设计与虚拟调试 概要:扬州十牛自动化拥有丰富的机器人与智能自动化产 Read More » 2024年10月23日 没有评论